


Description
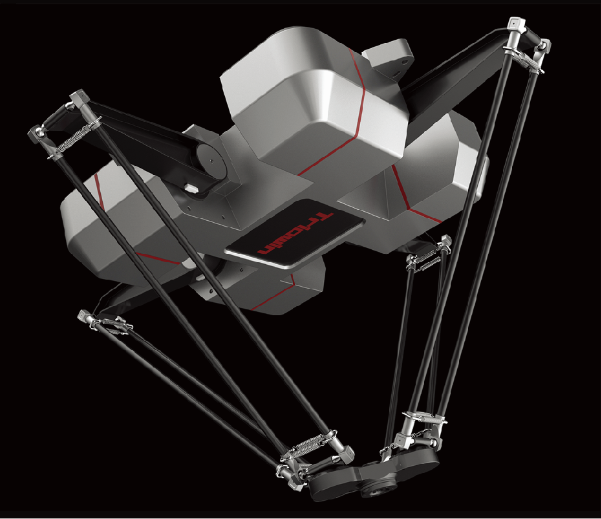
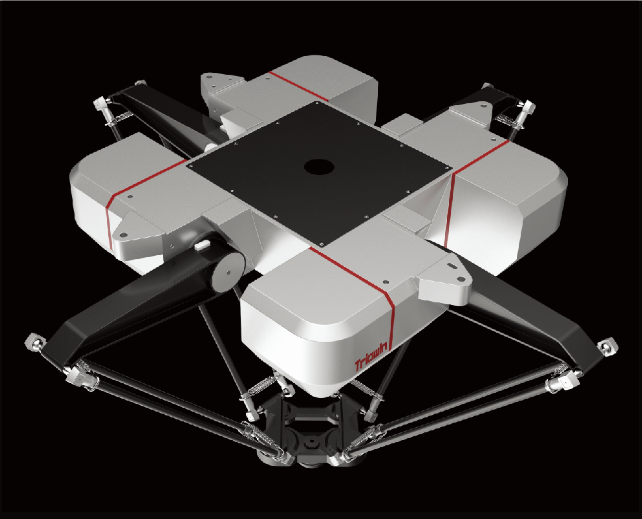
PicKING parallel robot is a dynamic modeling with 4-degree-of-freedom spatial symmetry robot, it is widely used for high-speed fetching placed, picking and packing container. The closed parallelogram of branched chain design can be sure that the robot can do the motion (three translations and one rotation) rapidly, stably and accurately.
The robot has the more superior dynamic performance:
1.increase the working space;
2.improve the speed and acceleration;
3.Enhance the rigidity of the quadrilateral structure;
4.Effectively reduce the maintenance of the robot.
The robot can be controlled by a variety of industry standard movement control system. The robot can realize random fetching the liquid mixed products with the visual system
* The robot is suitable for high speed picking and placing the packet goods.
* The ISO clamp interface is convenient for using the complex clamps and suckers.
* Low cost maintenance, remote monitoring and maintenance through the net.
* Intelligent, multi-angle vision control .
|
Work Efficiency
Standard Cycle(s) | Extended Cycle(s) | |
Mass(kg) | Efficiency (sec) | Efficiency (sec) |
0.1 | 0.30 | 0.46 |
1.0 | 0.36 | 0.47 |
2.0 | 0.37 | 0.52 |
4.0 | 0.41 | 0.58 |
6.0 | 0.43 | 0.61 |
Parameters
Robot Model | PicKING(TDR4006-1300) |
Controlled | 4axes |
Motion Range | Diameter:1300mm Height:276mm |
Accuracy | ±0.05mm |
Max Load | 6Kg |
Maximum Speed | 200times/minute |
Maximum Acceleration | 150meter/second |
Weight | 128Kg |
Drive Method | Electrical Drive |
Working Condition | Temperature:0-45°C |
Component parameters
|
Client Case
 |  |  |